LaTeX templates and examples — Two-column
Recent
https://3dv2021.surrey.ac.uk/ Note from Overleaf: SyncTeX (go to location in code/PDF) will not work correctly with this template (as well as other templates based on similar underlying code, eg CVPR, ACL, WACV etc) when the line numbers are active, on Overleaf as well as when compiled on local TeX installations.. To make SyncTeX function while authoring your manuscript, either on Overleaf or in your own LaTeX installation, the line numbers have to be turned off by uncommenting \threedvfinalcopy.

The viscosity of a particular fluid is an interesting parameter that plays an important role in fluid dynamics of that fluid. We chose the common household cooking item canola oil. Using a ball drop, we set out to measure viscosity at various temperatures and create a model for the viscosity of canola oil as a function of temperature, as well as an accurate measurement for viscosity at room temperature. It was found that the viscosity between 0 and 40 degrees Celsius can be approximated using an exponential function and that an estimation for viscosity at room temperature was not very difficult to obtain. The precision of this measurement was limited by uncertainty in lab equipment used to measure various quantities as well as the image analysis software we used and the limited frame-rate of our camera.
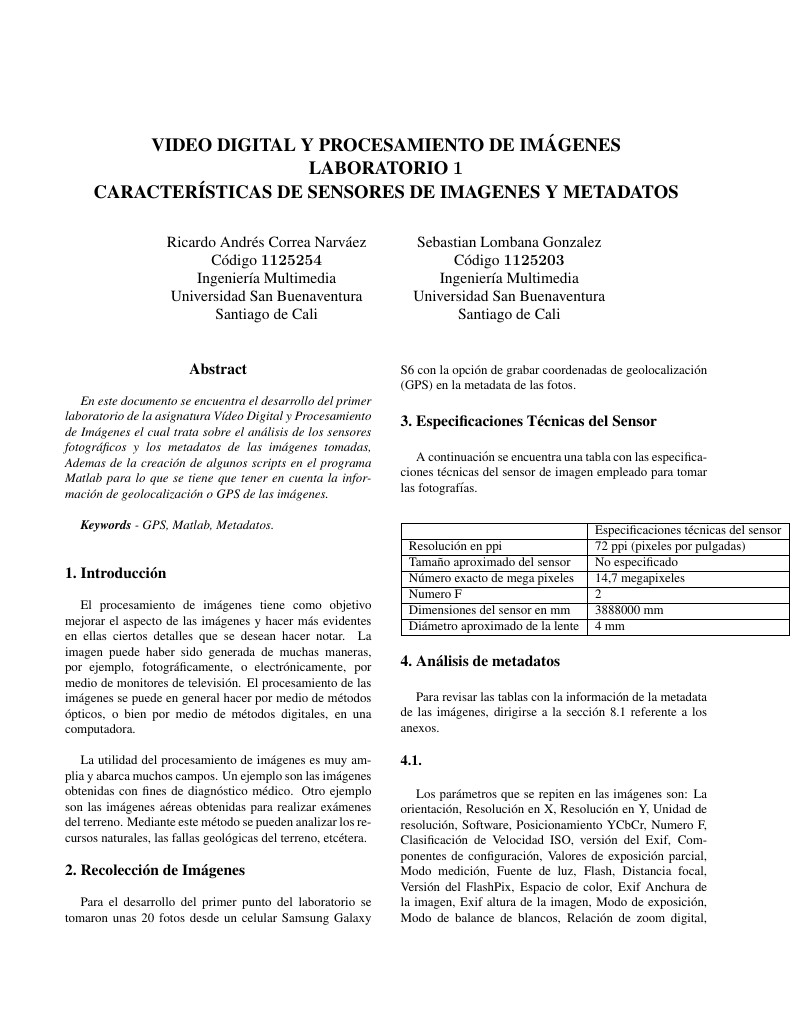
En este documento se encuentra el desarrollo del primer laboratorio de la asignatura Vídeo Digital y Procesamiento de Imágenes el cual trata sobre el análisis de los sensores fotográficos y los metadatos de las imágenes tomadas, Ademas de la creación de algunos scripts en el programa Matlab para lo que se tiene que tener en cuenta la información de geolocalización o GPS de las imágenes. Keywords — GPS, Matlab, Metadatos
This is a quickly built template to generate an abstract for AEGC 2021 conference in Brisbane. Although I haven't heard from the organizing committee if the pdfs are accepted, I still decided to prepare this template for your convenience.
Although the analysis of data is a task that has gained the interest of the statistical community in recent years and whose familiarity with the statistical computing environment, they encourage the current statistical community (to students and teachers of the area) to complete statistical analysis reproducible by means of the tool R. However for years there has been a gap between the calculation of matrices on a large scale and the term "big data", in this work the Normalized Cut algorithm for images is applied. Despite the expected, the R environment to do image analysis is poorly, in comparison with other computing platforms such as the Python language or with specialized software such as OpenCV. Being well known the absence of such function, in this work we share an implementation of the Normalized Cut algorithm in the R environment with extensions to programs and processes performed in C ++, to provide the user with a friendly interface in R to segment images. The article concludes by evaluating the current implementation and looking for ways to generalize the implementation for a large scale context and reuse the developed code. Key words: Normaliced Cut, image segmentation, Lanczos algorithm, eigenvalues and eigenvectors, graphs, similarity matrix, R (the statistical computing environment), open source, large scale and big data.
O conceito de automação residencial é definido como o conjunto de serviços proporcionados por sistemas tecnológicos integrados, sendo a melhor maneira de satisfazer as necessidades básicas de segurança, comunicação, gestão energética e conforto de uma habitação. Seguindo essa concepção, surgiu-se a ideia da criação de um Kit automatizado para janelas utilizando a plataforma Arduíno, visando a solução de problemas do dia a dia como o transtorno causado pela chuva e principalmente, gerando praticidade e comodidade para os cidadãos.

Instructions for NAACL-HLT 2019 Demo Track Proceedings. Author names should be included for Demo Track submissions.
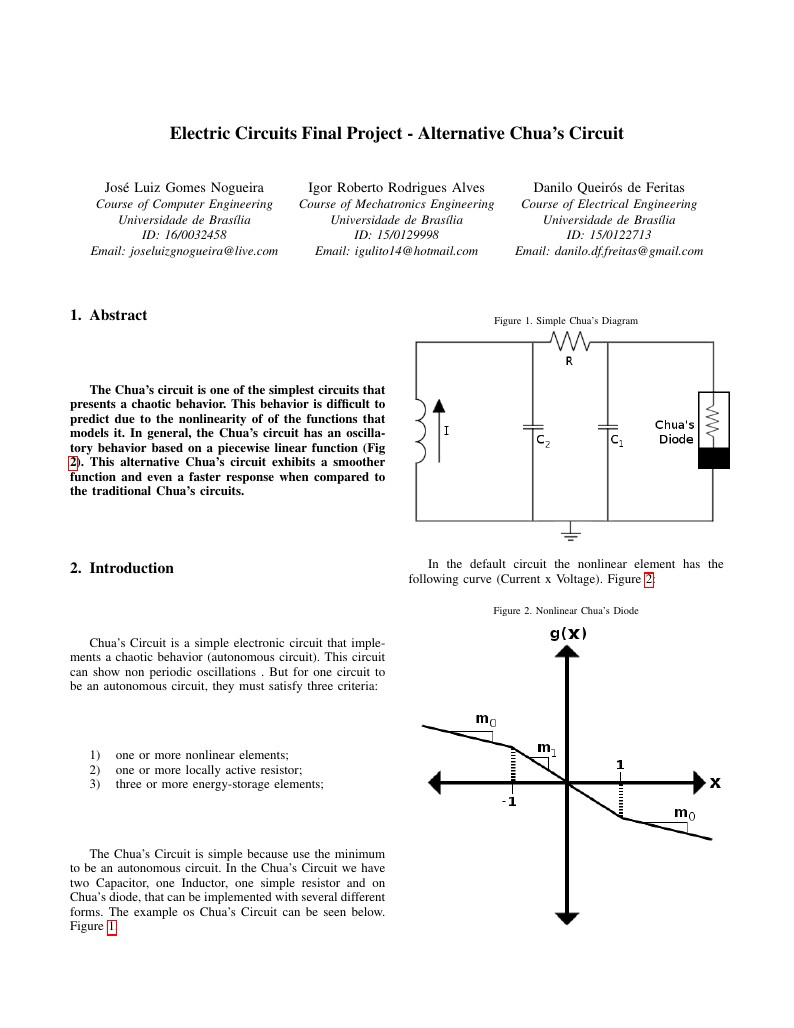
Projeto lab CE2
Esta plantilla esta basada en el formato IEEE Journal. Es utilizada para fines formativos en la asignatura de física para estudiantes de la educación media.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.