LaTeX templates and examples — Physics
Recent
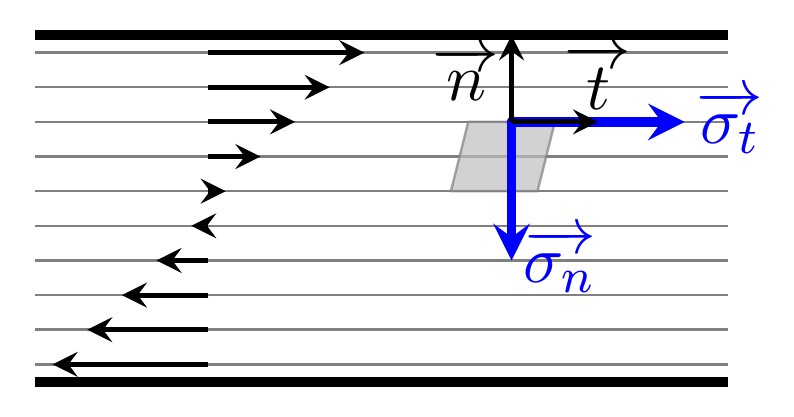
Ce document regroupe les codes TIKZ des figures utilisées pour le cours "FLUIDES VISUQUEUX" situé à la page http://femto-physique.fr/mecanique_des_fluides/mecaflu_C3.php

Chapitre 1, Peip1, Polytech'Nice Sophia
Articulo Colisionador de Particulas

LaTeX template I've used extensively for Engineering homeworks.

The fundamental necessity for water is a widespread issue affecting many communities across the globe. In this project, our team sought to provide an innovative solution to this problem for a small community with access to a relatively close source of flowing water. Resultant flow rate of water was calculated to be 0.498 L/min. Stress and strain analysis on individual subsections of the system were as follows: -44.2 MPa for bending moment in the rod; -7.04 MPa for shear stresses in the rod of the axis; -8.88E-5 for shear strain in the rod ; -1.11 MPa and .429 MPa of shear stresses in the L brackets; -0.123 MPa for radial stress of spiral, -0.422 MPa for hoop stress of spiral, -2.10 MPa for bending moment of spiral, and -0.176 MPa for the maximum shear stress of the spiral pump on the rotating wheel. The focus of the design remained fixated on water acquisition; however, further additions can be made for water purification.
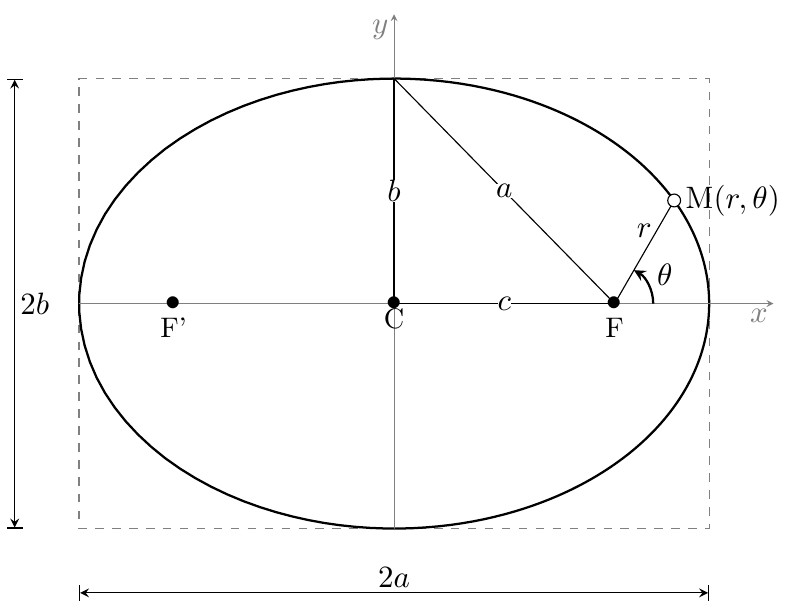
Codes TikZ des figures présents sur le cours "Les coniques" accessible à l'adresse : http://www.femto-physique.fr/mecanique/meca_complement2.php
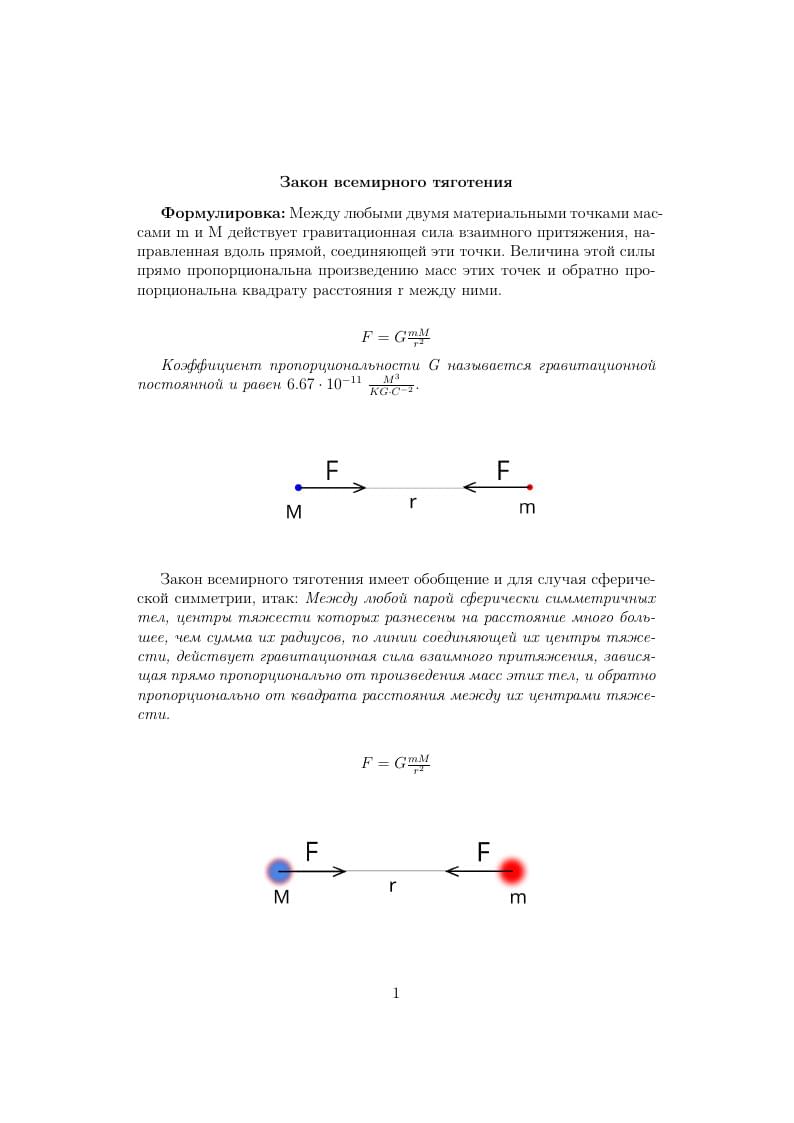
Параграф для энциклопедии, по соответствующей теме.
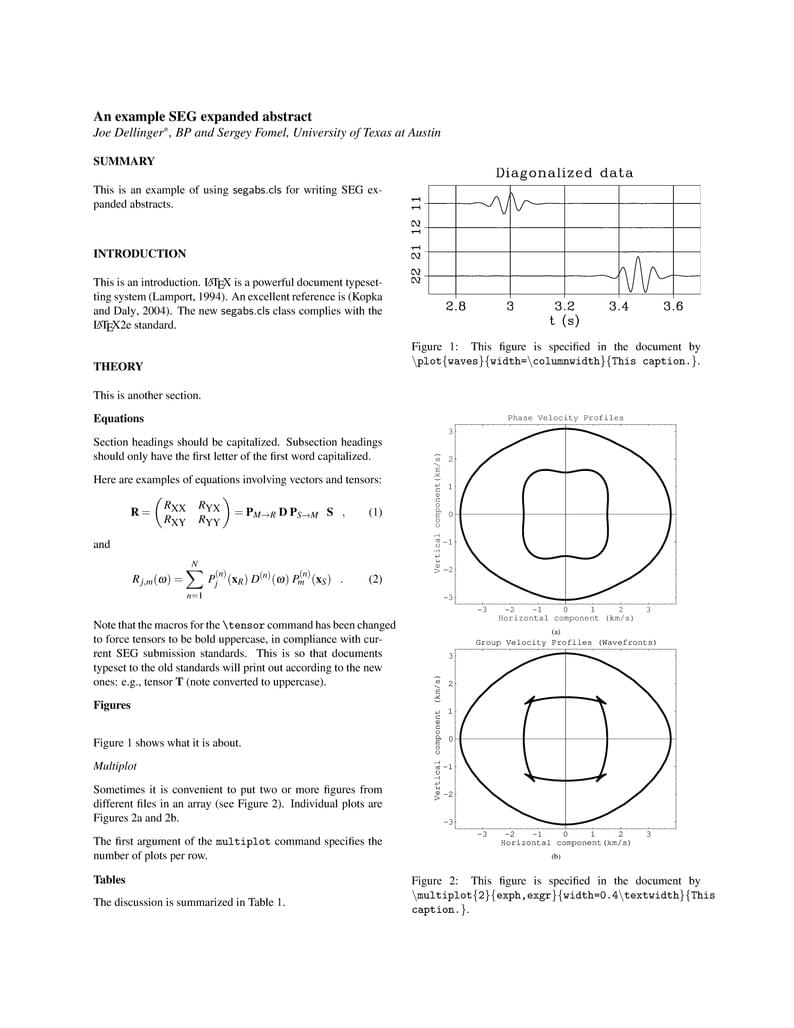
Template for writing SEG abstract.
Karisák.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.