overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
This report documents the program and the outcomes of Dagstuhl Seminar TBD "Seminar Sample".
兰州大学本科生学位论文模板
Template for Written Assignments for MAT 477 (Fall 2019)
We examine repeated iteration of various matrices from a graphical view, plotting each iterate vector for numerous randomly chosen initial values. Then we examine a specific matrix and how why it generates the Fibonacci sequence.
This demo file is intended to serve as a ``starter file'' for IEEE conference papers produced under LaTeX using IEEEtran.cls version 1.8b and later. This is one of a number of templates using the IEEE style that are available on Overleaf to help you get started - use the tags below to find more. IEEEtran.cls version: 1.8b
İstanbul Sabahattin Zaim Üniversitei, Mühendislik ve Doğa Bilimleri Fakültesi, Elektrik-Elektronik Mühendisliği Bölümü Lisans programı için Bitirme Çalışması (Mühendislik Tasarım Projesi) şablonudur.
Pantilla para crear ejercicios de ayudantía
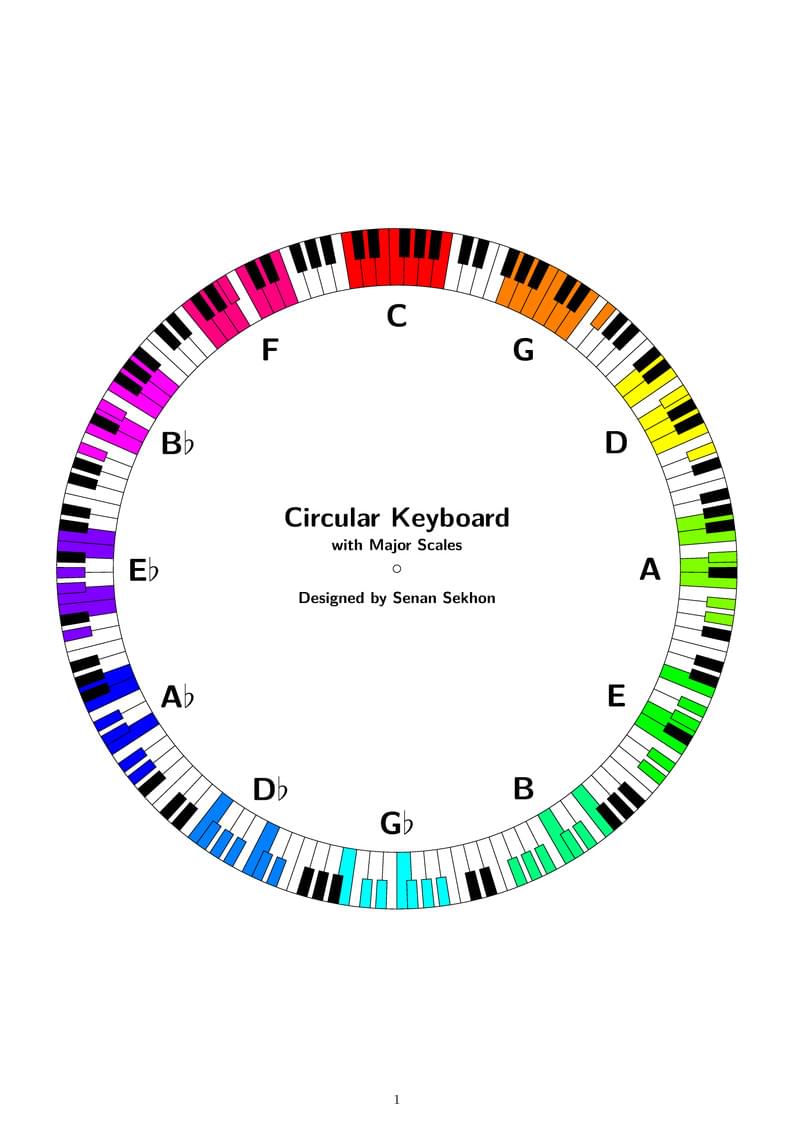
Circular Keyboard with Major Scales
UNOFFICIAL style for Posters at MPI-CBS Max Planck Institute for Human Cognitive and Brain Sciences Leipzig, Germany
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.