overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Template para os trabalhos e relatórios da Universidade Federal de Alagoas (UFAL)
B.tech Resume Of Ali Taqvi

Template for submissions to the Journal of Inquiry-Based Learning in Mathematics (JIBLM). Source and information: http://www.jiblm.org/info/authorinfo.php. This template was originally published on ShareLaTeX and subsequently moved to Overleaf in November 2019.
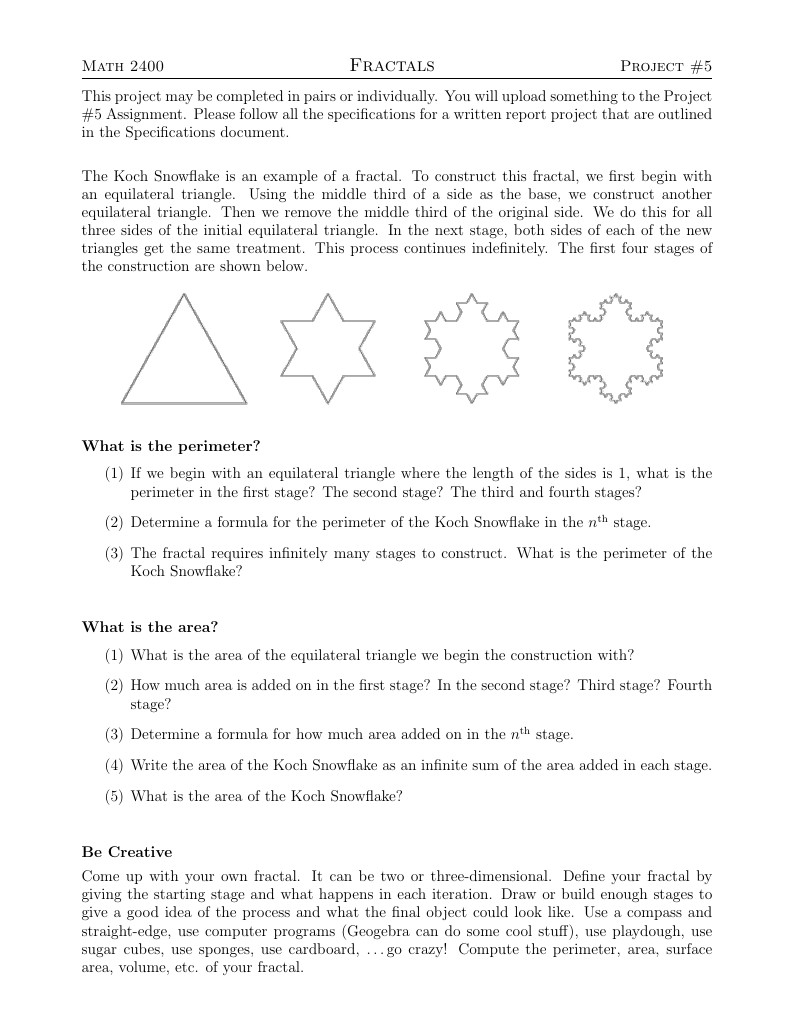
This project walks students through computing the perimeter and area of the Koch Snowflake as an application of geometric series. Students then create their own fractal and perform similar computations.

The purpose of this lab is to determine the spring constant of a given spring. This spring constant is given by the relation between the force exerted on the spring and the distance the spring is either stretched or compressed. This relationship is given through Hooke’s law which we are going to get a better understanding of throughout this lab.
This LaTeX template is designed for the BSc thesis Applied Mathematics at the University of Twente, The Netherlands. (Uploaded by dr. J. Timmer, programme coordinator of the BSc AM.)
CPILab Presentation Template
Template for the International Conference on Axiomatic Design (2020+) based upon Journal of Physics Conference Series.
Vedanshu Nagar's Résumé
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.